
Human factors and decision making on the race circuit has become embodied with technology, creating a form of ‘cognitive circuitry’ between mind and environment. The importance placed upon the environment when considering cognition is a relatively new approach to viewing human thinking and problem solving, and has been referred to as ‘distributed cognition’ or ‘extended mind’. The human factors field has provided the growth for novel methods and metrics aimed at modelling and evaluating complex human-machine systems. The brief review conducted within this paper focuses on the psychology and cognition of Formula One drivers. Qualitative deliberations were made regarding the relevance of some of the more recently developed metrics within human factors, highlighting the role of cognitive and evolutionary psychology on modern day racing circuits.
The field of human factors (HF) is developing rapidly from its embryonic days of World War II and has produced methods and metrics useful for assisting modern day motor racing teams. HF is a multidisciplinary field comprising such disciplines as psychology, cognitive science, industrial design, ergonomics, psychophysiology, engineering and sociology.
Though a focus on driver ergonomics, physiology, cockpit design and vehicle design have been present in Formula One for years, recent developments in HF now permit a more holistic view a racing team’s performance. There is a clear focus on enhancing the technology involved in Formula One, particularly within the vehicle itself and the telemetry systems employed to stream live data. From a safety and performance perspective it is easy to relegate the importance of the driver and support staff to these technological advancements. The aim of this article is to highlight the role of cognition in modern motor racing, along with useful metrics to help gauge and ultimately improve the various cognitive elements of motor racing.
Extending the Driver Mind
It is becoming evident that cognition is not a process which exclusively and solely occurs within someone’s head. There is in fact, a coupling of mind and external world, where a sort of agent-world circuitry is created (Berti & Frassinetti, 2000; Clark, 2008; Haugeland, 1998; Menary, 2010). Given the growing trend to view cognition not as a mere output of neural activity within the brain, an introduction into the cognitive elements which allow such coupling is presented. These elements are presented in an evolutionary perspective, focussing on how modern Formula One drivers use their evolutionary advances in thinking and cognition to defeat their adversaries on the circuit.
The fields of cognitive and evolutionary psychology are very large and comprehensive. The purpose of this article is to provide a brief introduction into some of the more relevant subject matter. The field of cognitive psychology is concerned with the study of mental activity in terms of information processing, while evolutionary psychology attempts to explain this mental activity as adaptations which have evolved to solve recurrent problems in human ancestral environments. One of the fundamental developments of our mental capabilities is concerned with our ability to make representations of the world in our heads (Gazzaniga, Ivry & Mangun, 2002). We develop these inner representations through sensing, perceiving and encoding, and transforming information in various ways. As such, we do not interact directly with the world, rather, with representations of it. Our understanding of and interaction with the world are shaped by the transformations we make with those inner representations. Thus, Gärdenfors (2006) considers inner representations as building blocks of what he terms ‘inner worlds’ (Gärdenfors, 2006). This has provided us with a particularly useful advantage, where rather than learning and adapting in the world through physical trial and error (a potentially dangerous venture), we can predict certain results of our actions all within our minds via complex cortical processes (Gärdenfors, 2006).
The benefit also lies in the fact that representations can be continually transformed and updated very rapidly. For example, a driver can quickly represent a circuit he sees on paper, and then transform it into a very detailed and 3D-like representation all within his mind. This concept is at the very heart of what some authors call ‘distributed cognition’, where information undergoes multiple representations and transformations as it is passed from one entity or system to another. As this happens in the driver’s mind, so too it can also occur outside in the real world (such as in telemetry or digital mapping systems).
From a basic sensory standpoint our visual representations, important for building our inner worlds within our mind are more than just rapidly changing snapshots. Our visual experience seems detailed, sharply focussed and high-resolution, when in fact this is not the case (O’Regan, 1992). The subjective impression of our ability to ‘see’ such vivid experiences in our mind goes beyond the abilities afforded by the limited stimulation of the retina through visual probing. Quite astonishing neural processing bridges the gap between the low level retina input and the detailed visual experience. We see this pattern of our abilities superseding our physiological capacity being repeated in our various other senses (Noë, 2004). Our senses actually work in unison, with a sort of brain-environment collaboration which allows a very detailed representation to be continually constructed within our mind. This extension and collaboration of our basic sensory abilities is an important step in our evolution and through our inner representations may play a particularly central role on a Formula One circuit.
The attending to and fusing of information from the environment via our senses goes only half way in providing an adequate picture of the world (Clark, 2008; Noë, 2004). As Gärdenfors (2006) so aptly put it, “Our senses don’t give us information about everything that exists in the world. The evolutionary point is that the richer representations help us predict what the world will look like” (p.33). Our representations therefore bridge the gap between our senses and the notable abilities humankind exhibit in a complex environment. In building representations however, sensory information needs to remain in the brain to be worked on, which is achieved by feedback loops in the nervous system that keep perceptions alive in the head (Smith & Kosslyn, 2007). The ‘primary areas’ of the cerebral cortex are designed to process incoming sensory signals, with the ‘secondary areas’ acting to coordinate and categorise them. Through this cortical fusion of information, inner representations can create very vivid and detailed inner worlds. Understanding and recognising these inner worlds can provide the driver with very useful cognitive shortcuts to typical situations. For example, having been in a serious crash previously and recognising its cues, the driver is more prepared to recognise such a hazardous scenario in the future, perhaps before it actually occurs.
Glenberg’s (1997) research on memory has shown how detached representations essentially suppress reality and the processing of information in one’s immediate surroundings. Suppressing or placing certain inputs in quarantine is a useful executive function, often performed by the frontal lobe of the brain (Smith & Kosslyn, 2007) and associated with attention. By doing so, the driver can focus on developing and transforming their representations, thus enabling a more detailed inner world to develop.
Detached representations are not only linked to our memory, but Grush (2003, 2004) suggests that they are also intimately tied to what is known as our ‘emulation neural circuitry’. Using detached internal representations, emulator circuits can run offline, simulating feedback via mental imagery. So rather than the primitive ‘closed-loop’ interactions animals have with their environment, we humans can imagine and predict outcomes of courses of actions in vivid detail. Here we find a separation between imagination and action, conception and actuation (Ramachandran, 2003). Intentionally derived ideas and representations can now augment and supplant reaction. For a driver, the advantage here lies in the fact that a plan or strategy can be mentally simulated without any harm to himself or colleagues. The results of these internal simulations, regardless of their accuracy, can then be used to modify the proposed plan. Here again however, we may see the trade-off mentioned above between the use of detached representations and the suppression of information processing relating to immediate surroundings.
The final point of our evolution of cognition relates intimately with one of the most critical roles of the Formula One driver: winning. As human beings we have a very useful ability to purposefully deceive; something which animals can not do in the planned sense (Gärdenfors, 2006). This ability is due not only to our inner representations mentioned earlier, but also to our ability to represent others’ inner representations and intentions. We instinctually represent others’ beliefs, goals and desires within our mind, and then anticipate their probable actions. For example, a Formula One driver attempting to overtake a driver infront of them may overtake on either the left or right side (a common tactical decision). The other driver defending the line can represent the overtaking driver’s desire in his mind (overtake) and predict likely actions (overtake on the outside on the oncoming turn). This level of intentionality by way of internal representations is particularly useful for predicting adverserial behaviour. Additionally, we can also boast an even higher order of intentionality, where inner representations of intentionality can be nested.
If the overtaking driver’s representation can include the inner world (assumed group of inner representations) of the defending driver, which itself includes a model of the overtaking driver’s own inner world, the overtaking driver can begin to deceive the defending driver. Put simply, if the overtaking driver has an idea of what the defending driver thinks he is doing, he can use that knowledge to his advantage. The overtaking driver could feign an overtake on the outside (what he believes the defending driver expects of him) and at the last second, overtake on the inside. Here we have the building blocks for deception. Figure 1 illustrates this concept of the nested inner worlds.
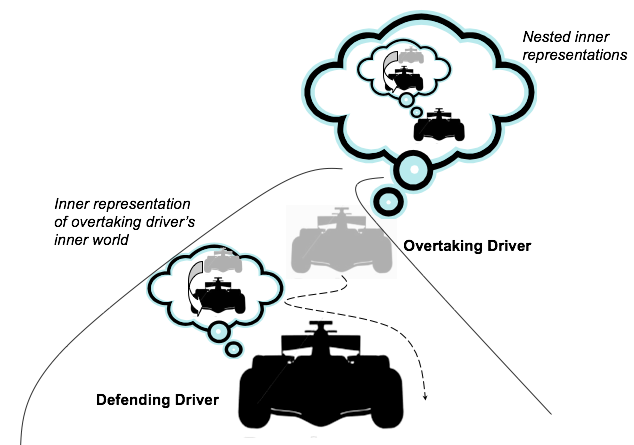
Figure 1: Illustration of inner representations and nested representations
As can be seen in Figure 1, the overtaking driver not only has a representation of the defending driver’s inner world, but also a representation of what the defending driver believes is in the overtaking driver’s inner world (and thus intentions). Deception is just one example of how inner representations aid (and sometimes inhibit) the driver on the circuit. Inner representations and the other cognitive building blocks mentioned in the previous sections also directly impact other driver tasks. Being able to handle nested representations within our mind for example, allows for very intricate deceptions, but also allows complex anticipations, plans and coordination (Gärdenfors, 2006). An introduction into how the various cognitive building blocks may apply on the circuit is now presented.
The benefits of our evolved cognition and ability to represent higher order intentionality provide the modern driver the ability to deceive, anticipate, plan, coordinate, and mentally simulate on the circuit. There is however another aspect to deception which involves our inner representations and higher order intentionality. Anticipating events on the circuit allows the driver to take pre-emptive measures. If we have nested inner representations of an adversary, we can anticipate their actions relative to their perceived view of my intentions.
Being able to anticipate events which may occur in the future provides us with a powerful evolutionary advantage (Gärdenfors, 2006). Anticipation is thought to occur by the individual driver experiencing and recognising a situation based on a certain constellation of cues. This recognition and subsequent decision to act occurs very quickly, such as when a driver senses the opportunity to pass another driver or perceive hazards on the circuit, and is often referred to as recognition primed decision (RPD) making (Klein, 1993). According to the RPD model, the simplest form of decision making (far left of Figure 2) occurs when the decision maker is able to recognize the situation and rapidly generate a satisfactory course of action. In this case, recognition of the familiar or typical situations enables the decision maker to predict which actions would typically work. Experience is essential because it allows the development of appropriate mental models[1] (mental scripts of how a situation should ‘play out’), prototypes, or functional categories for recognition as ‘typical’ (Klein, 1993; Klein & Calderwood, 1991; Lipshitz & Shaul, 1997; Wiggins, Stevens, Howard, Henley, & O’Hare, 2002).
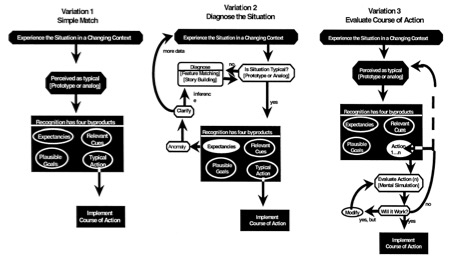
Figure 2. The Recognition-primed decision-making model. (From “Expert Decision Making,” by R. J. Hutton and G. A. Klein, 1999, Systems Engineering, 2, p. 40. Copyright 1999 by John Wiley and Sons.)
The second variant of the RPD model (second panel in Figure 2) describes what occurs if the situation is not familiar or typical. In such cases, the driver can use one of two strategies to better define and ‘diagnose’ the situation. The first strategy is feature matching, which involves deliberately assessing features against a so-called typical model by which a driver attempts to match the set of observed cues or pattern of cues with similar cases from past experience. The second strategy is story building, which involves developing a sort of rationale that links the features in a coherent form and explains why the situation appears as it does (Klein, Moon, & Hoffman, 2006).
The third variant of the RPD model (the far right panel in Figure 2) describes what occurs when there is uncertainty regarding the most appropriate action. This variant is particularly relevant to planning and decision making on the circuit when slightly more time is available to react to a given situation (such as preparing to overtake another driver). In these cases, the decision maker may sequentially test an alternative, reject it, and then test another option at a phenomenally fast rate. For example, the driver who is engaged in planning a particular overtaking manoeuvre may mentally simulate a particular course of action in their mind. This projection may afford him the ability to anticipate how the course of action may play out on the circuit. If his projection implies a poor fit, the driver can project another promising course of action via sequential evaluation. It is proposed that the interplay between a driver’s multi-level anticipations, inner representations, and emulator circuits within their cerebral cortex, provide the ability not only to mentally simulate a particular course of action, but also to judge and verify that the chosen course is on track (i.e., expectations of certain events being met). As Smith and Kosslyn (2007) state, “the mechanisms that allow us to produce actions also allow us to anticipate the likely consequences…” (p. 456).
Jeannerod (1994) has shown that activity patterns in the cortex during mental simulation of physical activity are very similar during the actual activity. This may evidence the neurological activity associated with mental simulation. Additionally, Smith and Kosslyn (2007) point to numerous studies which have evidenced the link between mental simulation and subsequent performance in a range of activities. A driver dedicating time to visualising their race on each circuit, before the race, may prove useful based on this evidence. Having such an evolutionary benefit of emulating within the mind affords the driver a safe and quick simulation capability to test out circuit options. This benefit is afforded not only to pre-race mental simulations and planning, but also more immediate and rapid action taking. During these activities the driver needs to consider the intentions of other drivers. Here, higher order intentionality (as described earlier) is a critical component of the mental simulation process.
Coordination is also essential when working within a team to achieve a common goal, and requires synchronised inner worlds between the driver, race engineer, strategist and pit crew, sometimes referred to as mental or situation models (Clark, 2008; Cohen et al., 1995; Lipshitz & Shaul, 1997). Anticipating the strategy of adversaries is not just the realm of the driver. In fact, one can present a similar picture for team strategists, as presented in Figure 1 earlier. The team strategist is also required to not only anticipate his counterparts but also to foresee what his counterparts are predicting he himself will do. Certainly in developing a race strategy, the entire team need to rate and assess potential courses of action regarding their possible outcomes and chances for success. With respect to this assessment, coordination primarily occurs by ensuring a common and accurate understanding and use of inner representations between all team members. This in turn allows the race to be concurrently tracked and anticipated by all team members involved, given the common understanding. Additionally, the common understanding and synchronised inner worlds allow a more fluid trade of concepts and ideas across the team. A brief introduction to some of the more Formula One relevant HF metrics is now offered.
Human Factors Metrics
Metrics have long been an obsession of team managers. The drive to gain more information for that competitive edge has given rise to advanced telemetry and communications systems. This information is useful for analysing vehicle and driving performance, but does not give any significant insights into the driver’s cognitive performance; a factor vital to any type of human performance. Though the field of human factors has, for whatever reason, not embraced the field of Formula One specifically, or motor racing generally, it has meticulously researched other drivers, managers, teams and operators in other fields. Leveraging from such research may enhance safety and performance in Formula One. Table 1 below provides a selection of HF metrics which relate specifically to Formula One.
Table 1. Human Factors Metrics Applicable to Formula One
| Metric | Definition | Formula One Relevance |
| Vigilance | Vigilance is a person’s ability to maintain attention and alertness over prolonged periods of time. There are various physiological (brain activity and eye movement) and subjective measures (questionnaires) which have been developed. Measuring devices have now been developed which can be fitted inside helmets to measure driver brain activity (Matthews, McDonald, Hervieux, Turner & Steindorf, 2007). | It is critical that drivers remain alert and vigilant during all phases of their race. This will increase the likelihood of success and decrease the likelihood of hazards. |
| Automation Bias | Automation bias refers to an operator using the outcome derived by an automated system as a “heuristic replacement for vigilant information processing” (Parasuraman & Manzey, 2010). The operator’s level of vigilance or their ability to maintain their focus of attention and to remain alert to stimuli over long periods of time, may also be impacted (Warm, Parasuraman & Matthews, 2008). As such, the user becomes over-reliant on the automation and tends to engage less with the system, which can ultimately lead to errors of omission[2] and commission[3] (Skitka, et al, 1999). | Given the availability of automated systems to the modern driver, and the associated data, it is easy for the driver to become complacent towards these systems and over-rely on them. |
| Trust | User trust reflects the operator’s belief in the reliability and dependability of the system they are operating (Itoh, Abe & Tanaka, 1999). | Similar to automation bias, increased automated systems require an ideal level of trust, not leaning toward either over or under-trusting the automated systems. |
| Situation Awareness | Situation awareness is the perception of elements in one’s environment, the comprehension of their meaning, and the projection of their status (Endsley, 1996). It is commonly understood to be a fundamental building block to time-critical and dynamic decision making environments. | The driver constructs their situation awareness by remaining vigilant and attentive during their race, observing relevant cues, reacting accordingly, and maintaining good communication with their team. Situation awareness aids the driver in rapidly recognising events and scenarios. The construction and maintenance of this awareness is critical for both driver safety and performance. |
| Team Cognition | The fields of HF and industrial/organisational psychology have been studying teams for decades (see Guzzo & Shea, 1992). It is understood that team members possess a shared understanding that allows them to function effectively as a team, including times of high stress (Orasanu, 1990). Team cognition is the cognitive ability team members posses, collectively, to function effectively and efficiently, and is a critical aspect to team coordination. There are HF methods currently developed to assess team cognition and team coordination (Cooke, Gorman & Kiekel, 2008; Salas et al., 2007). | Success in Formula One World Championships requires effective and consistent performance across the entire team. Possessing a shared understanding of the circuits, race events and driver state allow a team to coordinate, communicate and perform effectively. |
| Team Coordination | Team coordination refers to the use of appropriate team knowledge (e.g., about the situation, plan, team, etc.) to guide the selection and use of team actions. | One of the key products of team cognition, team coordination is of vital importance to pit stops and overall team performance. The shared representations of the relevant circuit are essential to team coordination. |
| Recognition-Primed Decision making | Recognition-primed decision making (RPD) is a decision making strategy often associated with experts in their field. Methods exist for identifying decision making styles and training in RPD making. | Formula One drivers are often making rapid decisions in the cockpit. These decisions are often safety critical and can sometimes represent the difference between a successful manoeuvre or corner and serious crash. Additionally, drivers are frequently employing their recognitional memories and detached representations of the circuit in an attempt to shave seconds of their lap times. |
| Mental Simulation | Mental simulation is the purposeful imagining of planned actions. Many alternatives can be considered, mentally, before a suitable option is chosen. Physiological and more subjective measures are available to measure an operator’s use of mental simulation. Additionally, there are training programs which can be specifically developed for Formula One drivers to enhance their mental simulation abilities. | Drivers may also use recognitional memories and detached representations to simulate the race in their minds before a race or plan a particular overtake. This mental simulation can improve a driver’s chances of success and also enhance their level of safety on the circuit. |
| Intentionality | Intentionality relates to a person’s ability to mentally represent others’ intentions. We instinctually represent others’ beliefs, goals and desires within our mind, and then anticipate their probable actions. Measures of intentionality have been developed and can be applied on the circuit during training. | As shown in Figure 1, intentionality and higher order intentionality (nested inner representations) are a commonly employed skill of drivers to not only anticipate and deceive other drivers. This intentionality not only relates to drivers but also to other members of the team such as the team strategist. |
| Workload | The research into workload posits that there is an optimal amount of workload that an operator can handle before performance deteriorates, altering workload away from this optimum level (either by increasing demands without increasing resources or vice versa) will result in decreased performance, usually in the form of error (Di Nocera, Fabrizi, Terenzi & Ferlazzo, 2006). It is important to note that workload can relate to cognition (cognitive workload) or tasking (task workload). | The modern Formula One driver, with the assistance of cockpit technology, has had task workload reduced considerably over the decades. Monitoring the feedback from this technology however, may actually have increased cognitive workload. |
Threat & Error Management
Threat & Error Management (TEM) was developed with a focus on human performance in aviation operations. The core aim behind TEM programs is to develop a mind-set for your staff which enhances the identification of threats, minimises the opportunities for error, and resolves those errors when they do occur. This is coupled with a focus on organisational systemic issues which are impacting operations, or in the F1 case, lap times. TEM is ripe for application to F1, particularly when one considers the fast-paced decision making required on the track and within the pit crew. TEM programs have been shown to significantly decrease the likelihood of error and the occurrence of incidents. More information about TEM can be found here.
Conclusion
Cognition in the world of Formula One is an interaction between mind, body, vehicle and environment. Future technology will undoubtedly push the boundaries of the driver mind outside the limits of just the cockpit, capitalising on the complex and sociotechnical nature of a modern Formula One team. The influence of evolutionary psychology and cognition has been highlighted to play a central role in Formula One and presents some useful notions relating to inner representations, intentionality, decision making and mental simulation. The use of human factors methods and techniques (principally with TEM) in measuring and assessing these variables may provide not only a better indication of driver psychology, but also an improvement in driver and pit crew performance and safety. Taking a more holistic approach to this evaluation should further advance the study of Formula One (and indeed, any other motorsport), permitting greater advancements in performance without a cost to safety.
References
Berti, A, & Frassinetti, F. (2000). When far becomes near: remapping of space by tool use. Journal of Cognitive Neuroscience, 12, 415–420.
Clark, A. (2008). Supersizing the Mind: Embodiment, Action, and Cognitive Extension. Oxford, NY: Oxford University Press.
Cohen, M., Thompson, B., Adelman, L., Bresnick, T., Tolcott, M., & Freeman, J. (1995). Rapid capturing of battlefield mental models. Technical Report 95-3, Cognitive Technologies Inc.
Cooke, N. J., Gorman, J. C., & Kiekel, P. A. (2008). Communication as team-level cognitive processing. In M. Letsky, N. Warner, S. Fiore, & C. A. P. Smith (Eds.), Macrocognition in teams. Hants, UK: Ashgate.
Di nocera, F., Fabrizi, R., Terenzi, M., Ferlazzo, F. (2006). Air Traffic Control Procedural Errors: Effects of Traffic Density, Expertise and Automation. Aviation, Space & Environmental Medicine, 77, 639-643.
Endsley, M. (1996) Automation and situation awareness. In: Parasuraman, R. and Mouloua, M. (eds.) Automation and human performance Mahwah, NJ, Lawrence Erlbaum Associates 163-182.
Gärdenfors, P. (2006). How Homo became Sapiens: On the Evolution of Thinking. London: Oxford University Press.
Gazzaniga, M. S., Ivry, R. B. & Mangun, G. R. (2002). Cognitive Neuroscience: The biology of the mind (2nd ed.). New York: W. W. Norton.
Glenberg, A. M. (1997). What Memory is for. Behavioral and Brain Sciences, 20 (1), 1-19.
Grush, R. (2003). In defence of some “Cartesian” assumptions concerning the brain and its operation. Biology and Philosophy, 18, 53-93.
Grush, R. (2004). The emulation theory of representation: Motor control, imagery, and perception. Behavioral and Brain Sciences, 27, 377-442.
Haugeland, J. (1998). Mind embodied and embedded. In J. Haugeland, Having thought: essays in the metaphysics of mind. Cambridge MA: Harvard University Press, 207- 237.
Itoh, M., Abe, G. and Tanaka, K. (1999) Systems, Man, and Cybernetics, 1999. IEEE SMC '99 Conference Proceedings. 1999 IEEE International Conference. Vol. 3.
Jeannerod, M. (1994). The representing brain: Neural correlates of motor intention and imagery. Behavioral and Brain Sciences, 17, 187-245.
Klein, G. (1993). A recognition-primed decision (RPD) model of decision making. In G. Klein, J. Orasanu, R. Calderwood, & C. E. Zsambok (Eds.), Decision making in action: Models and methods (pp. 138–147). Norwood, NJ: Ablex.
Klein, G., & Calderwood, R. (1991). Decision models: Some lessons from the field. IEEE Transactions on Systems, Man, and Cybernetics, 21, 1018–1026.
Klein, G., Moon, B., & Hoffman, R. R. (2006, November/December). Making sense of sensemaking 2: A macrocognitive model. IEEE Intelligent Systems, pp. 88–92.
Lipshitz, R., & Ben Shaul, O. (1997). Schemata and mental models in recognition primed decision making. In C. E. Zsambok & G. Klein (Eds.), Naturalistic decision making (pp. 293–303). Mahwah, NJ: Erlbaum.
Matthews, R., McDonald, N. J., Hervieux, P., Turner, P. J., Steindorf, M. (2007). Proceedings of the 29th Annual International Conference of the IEEE Engineering Medicine Biological Society 2007:5276-5281.
Menary, R. (2010). Cognitive integration and the extended mind. In R. Menary (Ed.), The Extended Mind (pp. 227-243). Cambridge,MA: MIT Press.
Noë, A. (2004). Action in perception. Cambridge, MA: MIT Press.
Orasanu, J. M. (1990). Shared mental models and crew decision making (CSL Report No. 46). Princeton, NJ: PrincetonUniversity, Cognitive Science Laboratory.
O’Regan, J. K. (1992). Solving the “real” mysteries of visual perception: The world as an outside memory. Canadian Journal of Psychology, 46(3), 461-488.
Parasuraman, R., & Manzey, D. H. (2010) Complacency and Bias in Human Use of Automation: An Attentional Integration. Human Factors: The Journal of the Human Factors and Ergonomics Society 52 (3), 381-410.
Ramachandran, V. (2003). Neuroscience – the new philosophy. The Emerging Mind, the BBC Reith Lectures 2003, Lecture 5. http://www.bbc.co.uk/radio4/reith2003/lecture5.shtml
Salas, E., Rosen, M. A., Burke, C. S., Nicholson, D., & Howse, W. R. (2007). Markers for enhancing team cognition in complex environments: The power of team performance diagnosis. Aviation, Space, and Environmental Medicine, 78, 77-85.
Skitka, L. J., Mosier, K. L. and Burdick, M. (1999) Does automation bias decision-making? International Journal of Human-Computer Studies 51 (5), 991-1006.
Smith, E. E. & Kosslyn, S. M. (2007). Cognitive Psychology: Mind and Brain (1st ed.). Upper Saddle River, NJ: Pearson/Prentice Hall.
Warm, J. S., Parasuraman, R. & Matthews, G. (2008) Vigilance Requires Hard Mental Work and Is Stressful. Human Factors: The Journal of the Human Factors and Ergonomics Society 50 (3), 433-441.
Wiggins, M., Stevens, C., Howard, A., Henley, I., & O’Hare, D. (2002). Expert, intermediate and novice performance during simulated pre-flight decision-making. Australian Journal of Psychology, 54(3), 162–167.
Wilson, K. A., Salas, E., Priest, H. A., & Andrews, D. (2007). Errors in the heat of battle: Taking a closer look at shared cognition breakdowns through teamwork. Human Factors, 49, 243-256.
[1] Mental models are most commonly thought to be long-lasting mechanisms stored in long term memory (Lipshitz & Shaul, 1997). When conducting tasks, such as defensive manoeuvres for example, ‘situation models’ are employed (Cohen et al., 1995) which though linked to relevant mental models can be rapidly updated and changed depending on the specific situation.
[2] Failure to respond to system irregularities or events when automated devices fail to detect or indicate them.
[3] Incorrectly following advice or directions due to automation.
Please click here to read more about Cortexia's Motorsport services.
Cortexia: Leading Human Factors Consultancy Australia